




- Source Code: https://github.com/jrkwon/oscar
- Data location: https://drive.google.com/drive/folders/1jzhYka9HaKet8SCMlTGZOCRoWol8M2IW?usp=sharing
- Paper: TBA
OmO is an incremental end-to-end learning for lateral control in autonomous driving.
Abstract
Developing an autonomous driving system necessitates the use of high-quality data. However, due to the high cost of human labor, collecting driving data is often too expensive. With minimal initial data from a human driver, this research provides a novel strategy that uses an incremental approach to data collecting and neural network training. The proposed method, One Minute Only (OmO), is an end-to-end behavior cloning methodology that uses a convolutional neural network to develop a lateral controller for a vehicle. OmO begins by collecting the minimal amount of human driver’s driving data, which includes steering angles, throttles, velocities, and geographical locations. The human driving data is used to train a convolutional neural network. The trained neural network is then deployed to the vehicle’s driving controller, an Artificial Intelligence (AI) chauffeur’s brain. A human driver is no longer in the loop at this stage, and the inexperienced AI chauffeur drives the vehicle on a simulated track to collect some further data. The collected driving data will be fed into a convolutional neural network training module, which will help the AI chauffeur develop a new and, hopefully, stronger neural controller. The two steps of data collection and neural network training with the gathered data alternate until the neural network learns to properly correlate an image input with a steering angle. Extensive experiments have validated our proposed work, OmO. We anticipate that by utilizing this incremental driving data collection and neural network controller training, human effort and time will be considerably reduced, and the development of autonomous car technology will be accelerated. The findings of the experiments, as well as data and other material, are available online.
Introduction
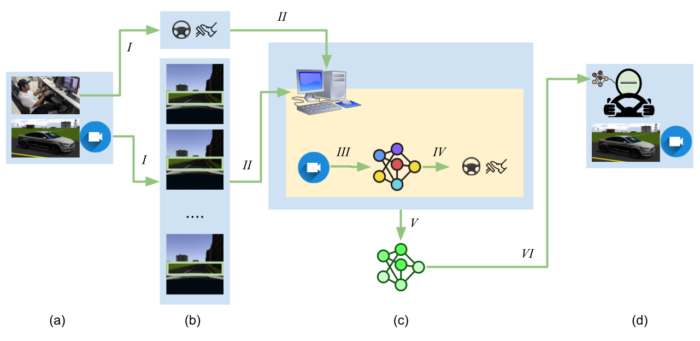
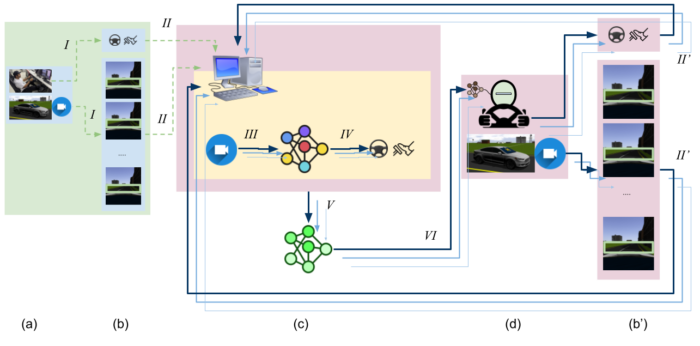
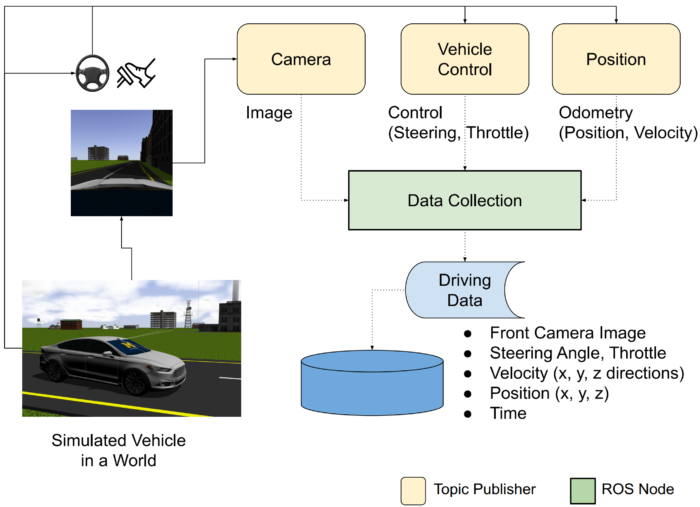
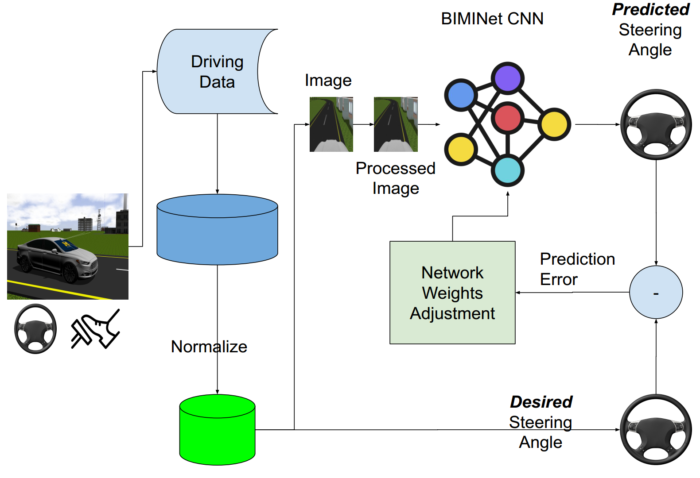
Data collection needs huge human effort. In this paper, we provide a novel strategy in which a human driver is required to drive only as much as is necessary, and an Artificial Intelligence (AI) chauffeur powered by a deep convolutional neural network drives on behalf of the human driver when more driving data is required. Figure 1 shows the high-level system overview. To begin, a human driver drives a virtual car and captures only the bare minimum of data needed to train a neural network to drive a short distance by replicating the human driver’s behavior. A human driver is no longer in the loop at this time. After that, a driving controller employs the trained neural network. We gave it the name of an AI chauffeur who is driving a simulated vehicle. We recorded driving data for a little longer as the AI chauffeur drove the vehicle. After training a new neural network with the newly obtained data, the AI’s brain is transplanted with a new neural network in the hopes of improving the AI’s driving performance next time. This process may be repeated iteratively until we have a neural network that can reliably predict steering angles enough to control the lateral motions of the simulated vehicle.
Method
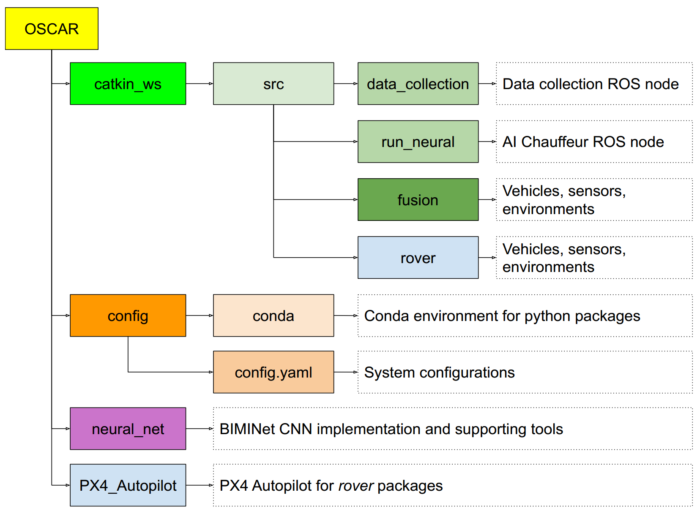
To implement and test our approach, we have been developing an open-source platform, OSCAR (Open-Source robotic Car Architecture for Research and education). https://github.com/jrkwon/oscar
Vehicle Design
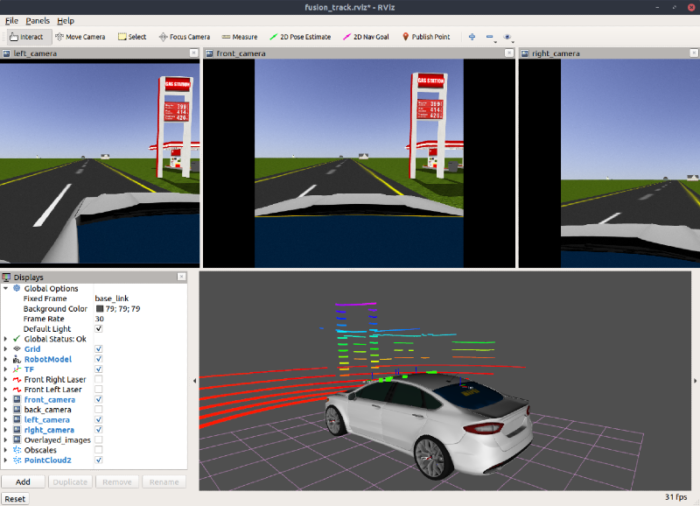
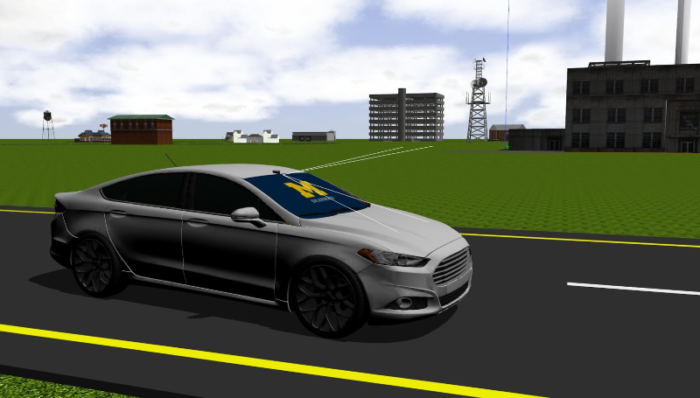
The chassis of the car is based on the Ford Fusion model. Three cameras are mounted on the front windshield. In this article, we solely used the front camera. Ouster’s 64 channel 3D LiDAR [11] is mounted to the top of the windshield. We did not employ the LiDAR sensor for this paper. The simulated car is built as a plugin within the fusion ROS package.
Tracks Design
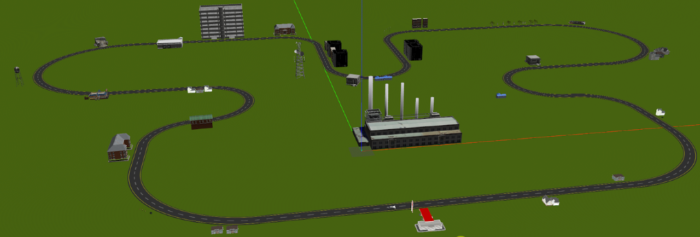
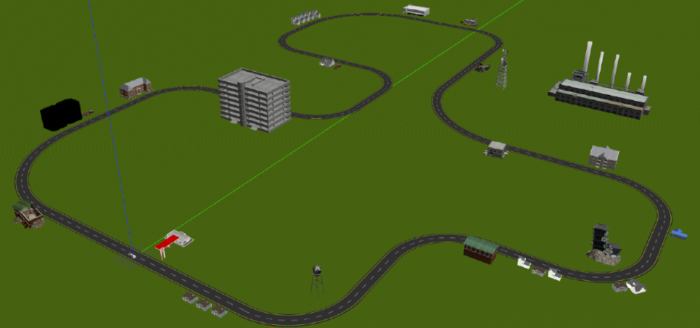
We designed two different tracks in the Gazebo world format (Track A and B). Track A was utilized to collect data for neural network training. The original track design came from Dataspeed ADAS kit Gazebo/ROS simulator, which includes a track for a lane-keeping demonstration. The track is created with modular road segment models that include straight road segments of 50, 100, and 200 meters and radius curve road portions of 50 and 100 meters. We embellished the track with roadside objects such as gas stations, residences, and major architectural complexes. This is important to give some variations in the roadsides to make the lane-keeping task more practical and realistic. In this work, all data collection tasks were conducted for training in Track A.
Data Collection
A simulated vehicle in the OSCAR platform sends its current velocity and position in a ROS topic named /base_pose_ground_truth. The current steering angle and throttle position of the vehicle is being sent through a ROS topic named /funsion. The front camera is used to collect data in this paper. The topic name of the camera image is /fusion/front_camera/image_raw. The image message must be converted to be saved as an image file. This can be done by cv_bridge.
Training
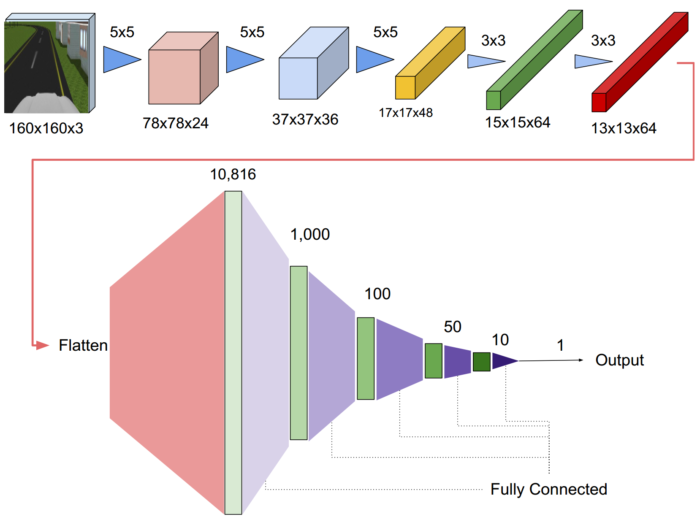
The image below is the neural network architecture that we used.
The training process can be described as follows.
Experimental Results
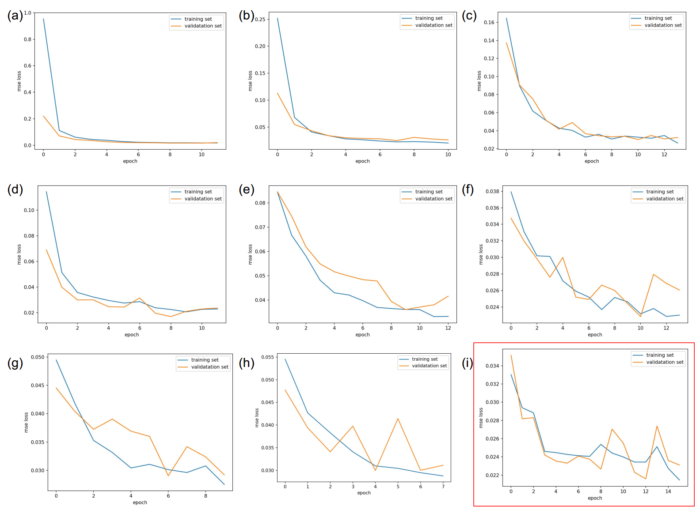
We collected one-minute driving data from a human driver and used the data to train a neural network. The first trained neural network will be deployed to an AI chauffeur who is like an inexperienced driver. We have the AI chauffeur drive the vehicle to collect the 2nd round of driving data. The collected data from the AI chauffeur who is not good at driving will be fed to train the next level of training. We continued this data collection and training cycle until the trained neural network successfully drives the track.
All data collected are available at this link. (TODO: add the Google Drive link of the datasets)
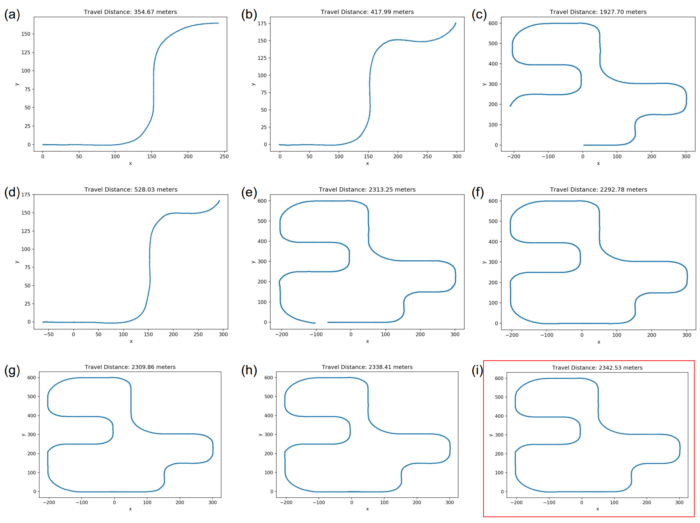
Data Visualization
Discussion
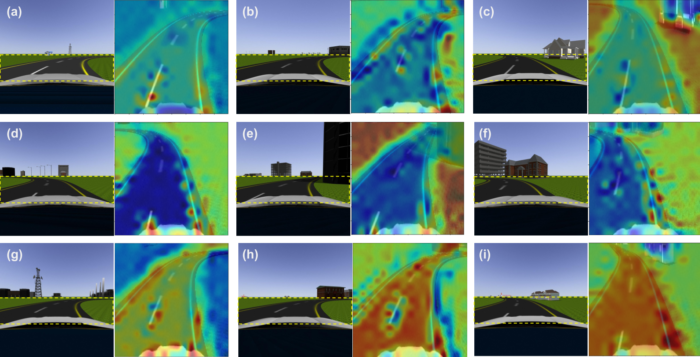
Activation maps. (a) – (i) are one minute, one minute 42 seconds, two through eight minutes respectively. Left in each label is a camera image input and right is an overlaid activation map on the region of interest. Blue is low and red is high activation values. The activations are taken from the last convolutional layer in the network. (a) show low confidence overall but some activations on the edges of the road. Interestingly up to five-minute data (d)-(f), neural networks learned the shapes of the roads is more important than the road itself. This can be a reasonable choice for neural networks to minimize MSEs of predictions due to the lack of varieties of both sides of the road. As more datasets were fed to the neural network training (g)-(i), the neural networks have to change the strategy to minimize MSEs due to different objects residing on the left and/or right side of the road that are not supposed to affect the steering angle predictions.
Conclusion
We offer OmO, a unique method that uses an incremental approach to data collection and neural network training using minimal data from a human driver. Extensive testing using two separate tracks and two different driving circumstances successfully validated the proposed method. We also developed OSCAR, an open-source platform for autonomous driving. We anticipate that by utilizing this incremental driving data collection and neural network controller training with the open-source platform, OSCAR, significant human effort and time will be saved, hence expediting the development process of autonomous car technology. As future work, we are planning to automate the entire process except for the initial human driving data.