





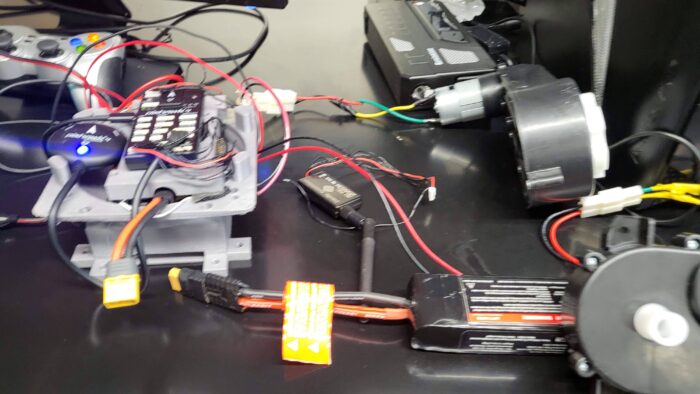
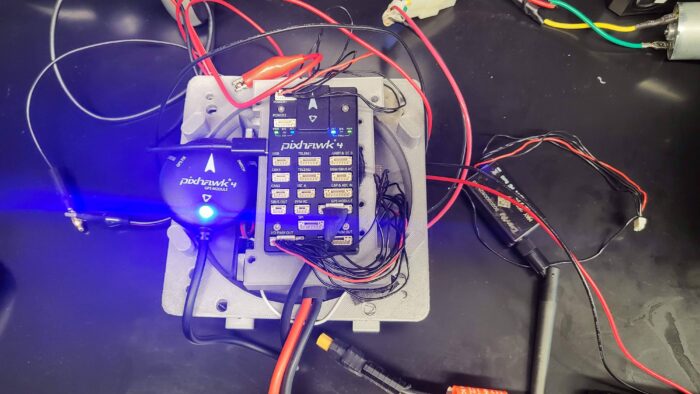


My MS student, Jesudara, completed building a prototype of a Drive-By-Wire (DBW) system powered by Pixhawk4 and PX4 for a mesoscale electric vehicle for his Master’s Thesis. The DBW system design focuses on its reproducibility by minimizing the use of custom hardware and removing any significant modification of off-the-shelf parts.
The vehicle platform with the DBW system, named M-ROVER (Michigan, Robotic Open-source Vehicle platform for Education and Research), can be used in advanced autonomy research and education through a ROS-based open source framework, OSCAR (Open-Source robotic Car Architecture for Research and education) developed by BIMI (Bio-Inspired Machine Intelligence) Lab.