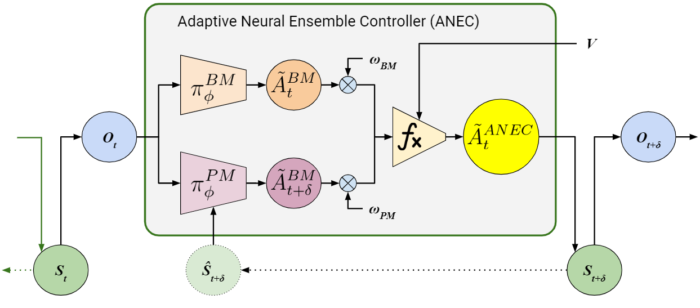
Our work on the adaptive neural ensemble controller has been accepted for The 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), which will be held October 1 – 5, 2023, at Huntington Place in Detroit, Michigan, USA. The paper title is “ANEC: Adaptive Neural Ensemble Controller for Mitigating Latency Problems in Vision-based Autonomous Driving.”