Attended the 11th IBRO World Congress of Neuroscience hosted by SENC at the Granada Exhibition and Conference Centre from 9-13 September 2023 with a poster titled “Artificial Neural Network Controller Using Sensory Motor Contingency For Highly Automated Mobility.”
As the internal procurement processes are near to finalization, my Ph.D. student, Aws, and I paid a visit to Dataspeed. After productive discussions regarding the purchase (remember that the original quote is more than 1.5 years old), Dr. Micho showed a Pacifica equipped with the company’s Drive-by-Wire systems.
We are even more excited now after the cool demonstrations, which show several advanced new features. Thank you, Dataspeed, for your time and effort to host us.
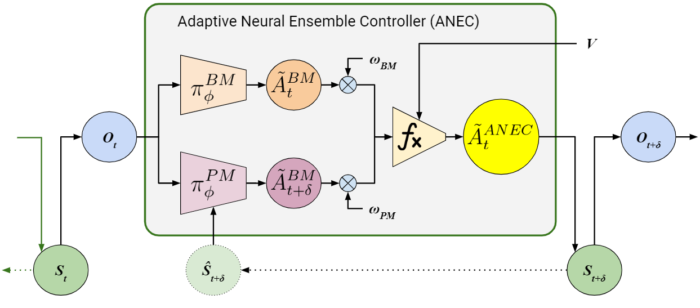
Our work on the adaptive neural ensemble controller has been accepted for The 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), which will be held October 1 – 5, 2023, at Huntington Place in Detroit, Michigan, USA. The paper title is “ANEC: Adaptive Neural Ensemble Controller for Mitigating Latency Problems in Vision-based Autonomous Driving.”
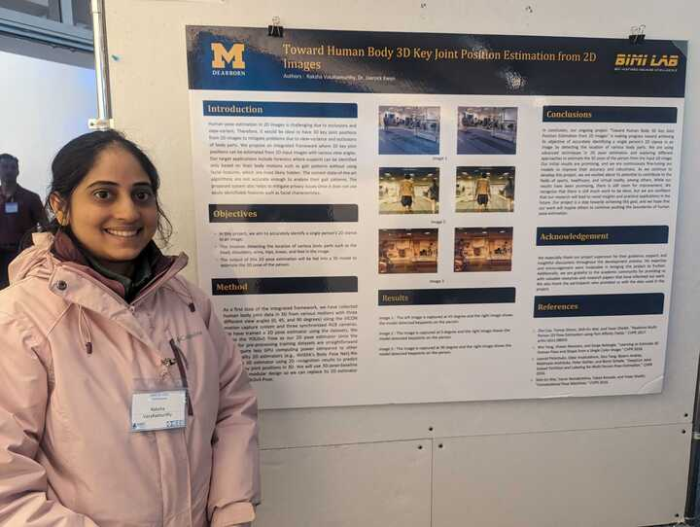
Raksha Varahamurthy and Shefali Gokarn presented their posters at IEEE Southeastern Michigan Spring Conference.
Poster: Toward Human Body 3D Key Joint Position Estimation from 2D Images by Raksha VarahamurthyPoster: Design and Implementation of Drive-By-Wire System for a Scaled Vehicle by Shefali Gokarn
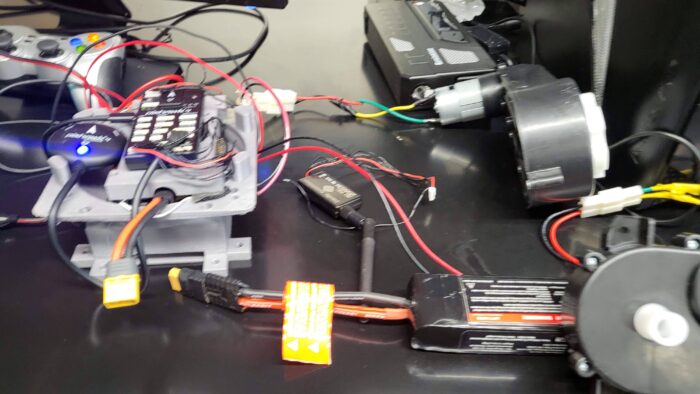
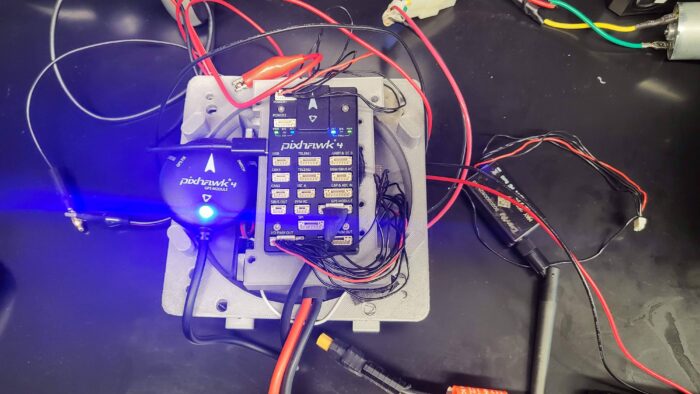
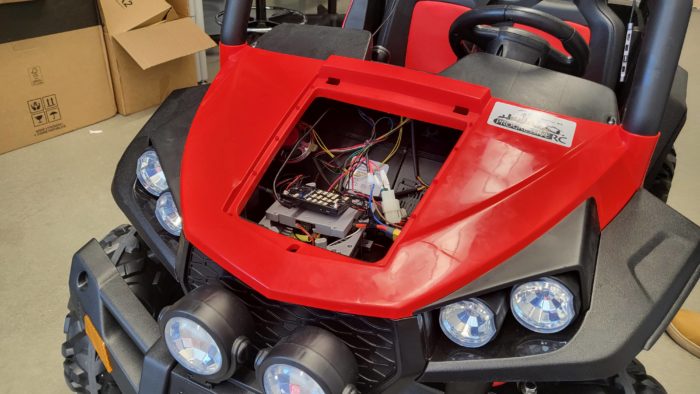
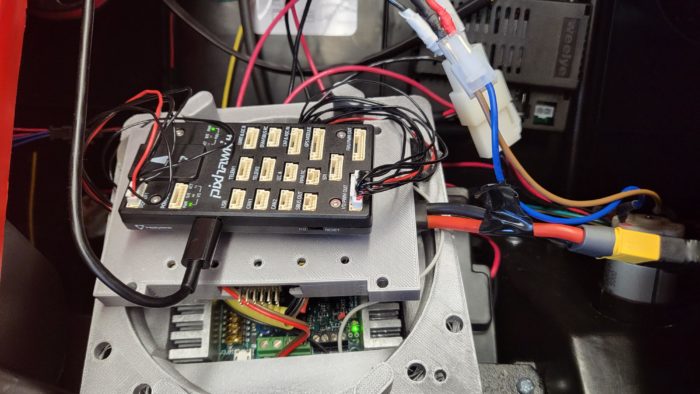
My MS student, Jesudara, completed building a prototype of a Drive-By-Wire (DBW) system powered by Pixhawk4 and PX4 for a mesoscale electric vehicle for his Master’s Thesis. The DBW system design focuses on its reproducibility by minimizing the use of custom hardware and removing any significant modification of off-the-shelf parts.
The vehicle platform with the DBW system, named M-ROVER (Michigan, Robotic Open-source Vehicle platform for Education and Research), can be used in advanced autonomy research and education through a ROS-based open source framework, OSCAR (Open-Source robotic Car Architecture for Research and education) developed by BIMI (Bio-Inspired Machine Intelligence) Lab.
My proposal to acquire an autonomous plug-in hybrid vehicle has been awarded. The project title is “MRI: Acquisition of Autonomous Plug-In Hybrid Vehicle Platform for Multidisciplinary Research and Education at the University of Michigan-Dearborn“ (Award #2214830). The project duration is from Sep 1, 2022, to Aug 31, 2025.